

Grazie al lavoro iniziato da Fulup Le Foll, un velista francese che ha condiviso il suo lavoro pubblicando questo articolo, è possibile Costruirsi un giroscopio per autopiloti Raymarine, spendendo circa 50 Euro ed utilizzabile per i modelli che ne prevedono il collegamento come ad esempio il vecchio 300 o i piu recenti S1 – S2 – S3. Chi avesse invece il diffuso ST4000 Weel non si illuda… perchè almeno che io sappia, a questo diffuso modello non si può applicare. Tuttavia, per quest’ ultimo, scriverò un breve articoletto per descrivere una semplice miglioria che lo rende in grado di pilotare con maggior tranquillità un attuatore lineare “Type 1”
Chi un minimo mi conosce, sa che non mi sarei mai potuto esimere dallo sperimentare questo Giroplus, nel tentativo di trasformare il mio autopilota Raymarine S1, in un S1G, e quindi eccomi a raccontarvi come ho proceduto, e premetto che è un progetto davvero di facile costruzione e adatto a chi sappia tenere in mano un saldatore a stagno e fare qualche piccola saldatura su circuito stampato.
Perchè montare un Giroscopio al nostro Pilota Automatico:
Quando si naviga con il pilota automatico, sopratutto se si naviga a vela, la barca sotto la forza del vento e dell’onda, tende a fare dei piu o meno accentuati cambiamenti di direzione rispetto alla rotta da noi impostata, ed il nostro Timoniere elettronico ha il compito di correggerne i movimenti, mantenendola sulla rotta da noi voluta. l’ autopilota, per fare ciò riceve le informazioni dalla bussola Fluxgate, e quando le condizioni del mare e del vento non sono eccessive, questo sistema va piu che bene.
Le cose cambiano sostanzialmente quando l’onda inizia ad essere formata ed il vento soffia con raffiche importanti, a quel punto, la Fluxgate (che altro non è che una bussola elettromeccanica), non riesce a fornire all’autopilota i dati in modo sufficientemente preciso e veloce, costringendo il timoniere a prendere in mano la ruota e non mollarla più.
Basta pensare a quante volte ci si è trovati sotto spinnaker con onda formata e vento ben teso, senza mai poter mollare un attimo il timone, magari anche semplicemente per pulirsi gli occhiali. E’ proprio in queste condizioni di mare e vento che il giroscopio fa maggiormente apprezzare del suo importante contributo.
Questo piccolo “genio” infatti è in grado di rilevare in modo velocissimo e preciso, anche in condizioni impegnative per molti timonieri, ogni minima rotazione dello scafo verso destra o sinistra, inviando immediatamente i dati al pilota automatico, che effettuerà la correzione dovuta in modo rapido e preciso, riuscendo anche ad “anticipare” l’onda quando l’abbiamo al lasco o in poppa, proprio come farebbe un buon timoniere.
La prima versione del Giroscopio
Questo tipo di Giroscopi, si basano su un piccolo chip che ha la funzione di sensore piezoelettrico di movimento. Analizzando il Gyro che Raymarine vende come accessorio per i suoi piloti automatici, a cifre attorno ai 1000 Euro, si può vedere che vi sono in commercio analoghi micro-chip, perfettamente equivalenti o adattabili, usati spesso nel campo del modellismo, e dal costo irrisorio rispetto all’accessorio originale.

Partendo da questo, il buon Fulup Le Foll ed altri membri del forum, scoprirono che Raymarine utilizzava per le versioni “G” dei suoi piloti, il chip 05DB NV-52 della Murata, e che aveva un suo equivalente in un chip, montato su un piccolo circuito stampato con i pochi componenti passivi necessari, prodotto dalla Sparkfun e denominato ADRXS613, poi uscito di produzione, e sostituito dal IDG500 (un gyro a due assi, di cui ovviamente se ne può utilizzare solo uno), entrambi con caratteristiche simili a quello Raymarine.
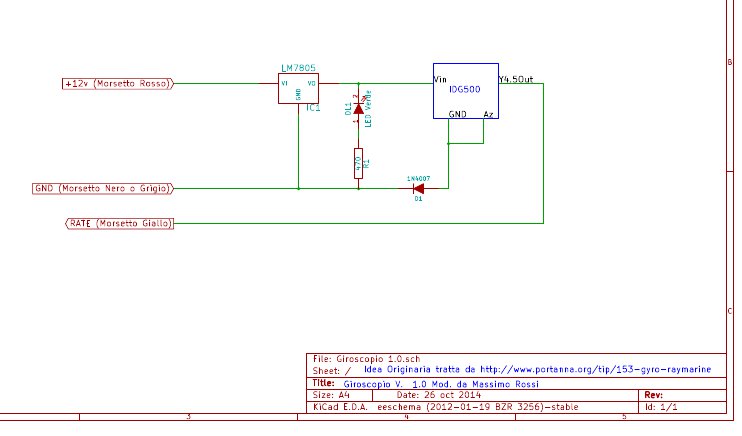
Per l’utilizzo di questi chip, che funzionano con una alimentazione di 5V si rendeva necessario aggiungervi un piccolo regolatore di tensione, poichè i Piloti Automatici in questione forniscono al Gyro una alimentazione di 12Volt, cosa fattibile molto semplicemente con un regolatore di tensione tipo 7805. Così è nato il primo Giroscopio. I primi test fatti dai colleghi Francesi erano incoraggianti e, se pure con qualche difetto, funzionavano discretamente bene, anzi, se si considerava la differenza di costo con quello della casa madre, direi ottimamente!
Il mio Giroscopio per Alcyone V. 1.0
Dopo aver ordinato e ricevuto il magico Chip, non restava che da realizzargli un piccolo circuito per alimentarlo correttamente (il Pilota Raymarine fornisce +12Volt mentre l’ IDG500 va alimentato a +5V) e correggergli, per quanto possibile, la tensione di riferimento, a giroscopio fermo, leggermente difforme da quanto accettato dai Piloti Raymarine. e trovargli alloggiamento in un contenitore tale da poter poi essere fissato in modo corretto ad una paratia dello scafo (nel mio caso la paratia che separa il vano motore e le cuccette di poppa, dal vano tecnico della timoneria.
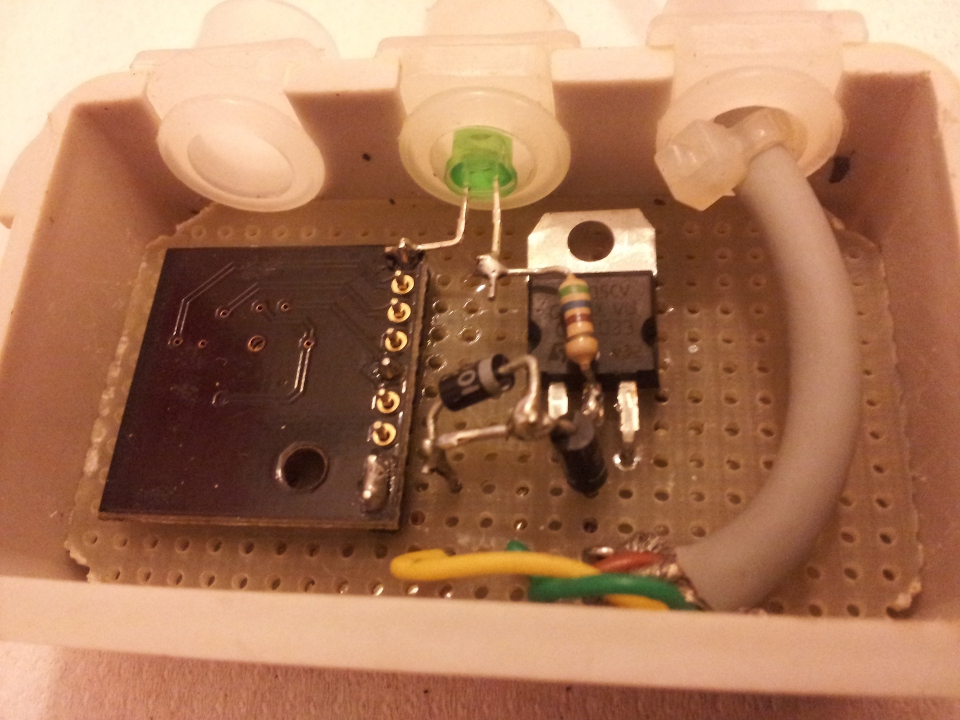

Come contenitore, i puù esperti, avranno certamente riconosciuto che ho utilizzato quello di un vecchio partitore TV, che si usavano una volta sulle discesa d’antenna in esterno. L’ho trovato perfetto per il mio scopo, avendo anche le due alette laterali per il fissaggio a parete.
Appena fatta l’installazione in barca, subito il Pilota lo ha riconosciuto, portando i livelli di regolazione della sensibilità fino a 9. A quel punto ho rifatto la procedura di ricalibrazione del Pilota e l’Autolearn. Terminate le tarature, subito fin dalla prima prova il Gyro ha fatto sentire la sua presenza, anche i test successivi, fatti con mare formato, devo dire che sono stati davvero soddisfacenti. Tuttavia…. un difetto lo aveva! Come già segnalato dai colleghi Francesi e da altri, pur funzionando bene, in alcuni casi introduceva un ritardo sulla lettura della Fluxgate, quindi, bisognava stare attenti ad inserire il Pilota autometico, solo dopo aver mantenuto manualmente la rotta per un paio di minuti. Insomma, inserendolo al termine di una virata, era uno scempio!…
Tuttavia al momento era una cosa trascurabile, se pur fastidiosa, rispetto ai vantaggi che forniva!
Ma ancora una volta devo richiamare l’attenzione di chi mi conosce un pochino…. potevo lasciare le cose in questo modo?
Assolutamente NO!!
Così cercando un po in rete notizie, datasheet ed informazioni che potevano essermi utili a risolvere il problema, mi sono imbattuto in una discussione su quello che io ritengo essere il miglior Forum per noi velisti che amiamo curarci in prima persona della nostra barca, facendo da soli tutti i lavoretti possibili. Sto parlando di AmiciDellaVela.
Questa discussione faceva proprio al caso mio, anche se ero arrivato in ritardo per partecipare attivamente al progetto, ho così appreso che i mitici ADV (ndr. Amico Della Vela, così ci si chiama nel forum) Francesco72, Colibrì, Iansolo e tutti gli altri, erano già a buon punto nella progettazione di un Giroscopio battezzato ADV-Gyro.
Ovviamente me ne sono subito procurato uno ed avendolo appena montato, appena possibile uscirò in barca per fare la nuova calibrazione e autolearning del Pilota. Successivamente vi terrò informati sulle prove, già molto positive da parte di altri colleghi ADV, e ve ne descriverò la costruzione.